RAPID PROTOTYPING
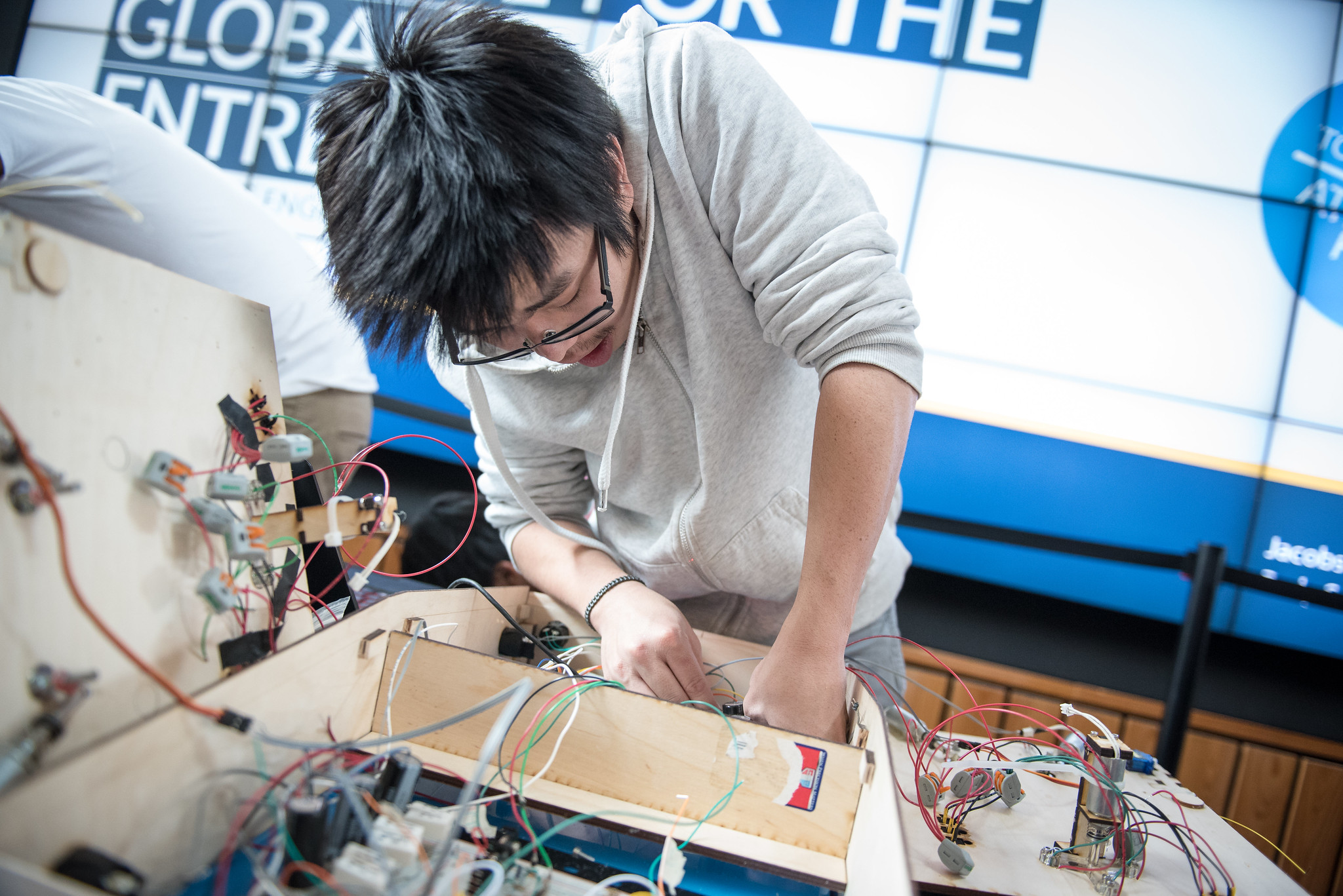 The objective in this class was to utilize rapid prototyping tools such as CAD, 3D-printers, laser cutters, and tools in order to quickly iterate through designs and create a pinball machine. I decided that for my design, I wanted to create a 2-player competitive machine. Throughout the quarter, I worked to create the design, mechanisms, circuits, and sensors.
The objective in this class was to utilize rapid prototyping tools such as CAD, 3D-printers, laser cutters, and tools in order to quickly iterate through designs and create a pinball machine. I decided that for my design, I wanted to create a 2-player competitive machine. Throughout the quarter, I worked to create the design, mechanisms, circuits, and sensors.
Media: Google Drive
RESEARCH ASSISTANT (NZ)
While studying abroad at the University of Auckland, New Zealand, I wanted something to do besides my classes in between traveling. Eventually, I talked to Dr. Michael Barley who had coincidentally gotten his undergraduate degree at UCSD. He told me about a heuristic selection algorithm which utilized evaluation times as the primary metric that he had been contemplating for some time. After some in-depth explanation of his thoughts on the algorithm, I was happy to take my first leap into research by helping him bring his theory to code. With his help, we were able to develop and run analysis on the efficiency of our algorithm.
At the end of my time in New Zealand, I compiled my research and conclusions into a paper here.
OCEAN LAB SWARM ROBOTICS
Ocean Lab Swarm Robotics’s goal is to help growth in the Swarm Robotics industry. They have been developing robotic swarm systems for distributed mapping intervention in aquatic settings.
About half my time at Ocean Lab was spent building a GUI to visualize and control their existing Swarm Robot platforms. Being able to visualize and easily control the swarm in the ocean was important for testing out the robots. Working closely with their engineers, I created a program which interfaced with their existing system and was able to map the locations and paths of the each robot in the swarm. By analyzing their movements, information about currents, vorticity, and more were obtained. Depending on what kind of information we were looking for, we could then move the swarm to a different location or configuration in order to gather more data.
The other half of my time was used for self-guided research into a DIY high-powered wireless power transfer system. At the time, all of the commercially available wireless charging solutions were low-powered and designed for recharging devices like phones and toothbrushes. We were looking for a system which would allow us to recharge the lithium-polymer batteries used to power our robots. While it was still within reason to charge the seven robots we had at the time, the long-term goal was to produce a swarm of hundreds of robots which could be dumped into the ocean from a box. The hope was that the swarm would be able to be charged while in storage by simply placing the entire box on a charging station. As such, the time taken to set up charging a swarm would be seconds, rather than hours of removing, charging, and replacing batteries.
Media: Google Drive
E4E WOLF TRACKER
![]() Engineers 4 Exploration (E4E) is an organization which connects students to scientists, researchers, and explorers in order to help engineer solutions which do not yet exist.
Engineers 4 Exploration (E4E) is an organization which connects students to scientists, researchers, and explorers in order to help engineer solutions which do not yet exist.
Collaborating with the California Wolf Center, we worked to create a rover which would allow them the researchers to observe the wolves in their sanctuaries in a more natural habitat. Continuous human interaction, or even the presence of a human can slowly change a wild animal’s behavior over time. Our goal was to create a remote controlled rover which would be able to traverse the rugged terrain of the enclosure in order to remotely monitor the wolves without disturbing them.
Heading the Sensor and Electronic teams, we handled motor and sensor selection, power system design, sensor integration, and wiring of the entire robot. Our efforts produced a 6-wheeled rover with an HD camera, IR camera for enhanced vision at night, gimbal for camera control, and an IMU for visualizing orientation.
At the end of the year, we presented our work at the Cornell Cup by Intel and were able to receive an honorable mention.
Media: Google Drive
CAMP 404
In 2012, our robotics team founded Camp 404. We designed Camp 404 to be an extremely affordable science/robotics camp in order to introduce elementary and middle school children to the wonders of Robotics and Engineering while fundraising money for the club.
As one of the Co-Founders and Directors, I helped conduct all business aspects of running a camp including planning, logistics, marketing, and accepting payments. In addition, I was in charge of designing an approachable curriculum for children as young as 10 and training the other mentors in it.
At the end of our two weeks together, our students had teamed up to build robots and compete in a camp competition we designed. When we opened reopened camp registration the following year and received an overwhelming amount of both new and returning students, we realized how much of an impact we were able to the younger generations.
Media: Camp 404 - 2012 & 2013
ECR ROBOTICS TEAM 404
 VEX Robotics is a world-wide robotics competition based around a new game field every year. Team 404 had already won the World Championships the year before I joined, and remained among one of the best teams in the world after. In my time there, we won countless regional competitions, two National Championships, and made it to the semi-finals stage of the Worlds while competing against over 400 other teams from around the world.
VEX Robotics is a world-wide robotics competition based around a new game field every year. Team 404 had already won the World Championships the year before I joined, and remained among one of the best teams in the world after. In my time there, we won countless regional competitions, two National Championships, and made it to the semi-finals stage of the Worlds while competing against over 400 other teams from around the world.
During my second year, I became Captain in order to help guide our team to victory. In order to show our strength after winning Worlds, our team expanded and began producing more and more World-Qualified robots each year. As captain, I was responsible for helping design, build, and program as many as six competition robots at a time. Our strength came from not only our dedication and experience, but also from our strong sense as a team. While each robot competed separately and had their own primary drivers, builders, and coaches, we always functioned as a world renowned team sharing both victory and defeat.
Media: Google Drive